
|
|
工业机器人限位器式和点位式控制装置的使用范围 二维码
1329
来源:JZ Robot网址://xhrxyx.com/h-nd-223.html 工业机器人的限位器式点位控制装置(循环式控制装置)和点位式控制装置的主要使用范围首先取决于定位点数、定位精度和动作快速性。 采用限位器定位控制方法的机械手结构特性限制了手爪定位点数,平均每个运动自由度最多为2~4个定位点(虽然个别运动自由度的点位数可达8个)所以,对于具有四个主要运动自由度(升-降、水平转动、升-缩、手爪转动)的机械手,手爪定位点数平均为20~40个。假若除去原始位置并且考虑到大部分点位是在中间位置定位(接近和离开),那么,对于采用限位器定位方法控制的机器人,同生产设备相互作用的点数一般不超过4~6个。这就意味着,这种机器人能够用于一个,最多二个主要生产设备单元及2~3个辅助生产设备单元。 至于点位控制机器人的机械手,在工作区的定位点数实际上没有限制,并且控制装置能保证同生产设备相互作用点的数目为10~100,甚至可更多些,这相应于存储装置的容量为50~2000个点。 为在精度及动作快速性方面对所研究过的方法进行比较,现在来看看图1所示的图表。图中对各种机器人作出了机器人手爪移动**速度v与定位精度δ之比取2为底的对数的值。从图1可看出,采用各种控制方法的机器人的明显区别。对所研究的参数,采用限位器定位方法控制的机器人有**值。由此就可断定,这一类机器人在机器人定位速度方面不次于点位控制机器人(有时还要超时),而且按固定的限位器定位的精度相当高。 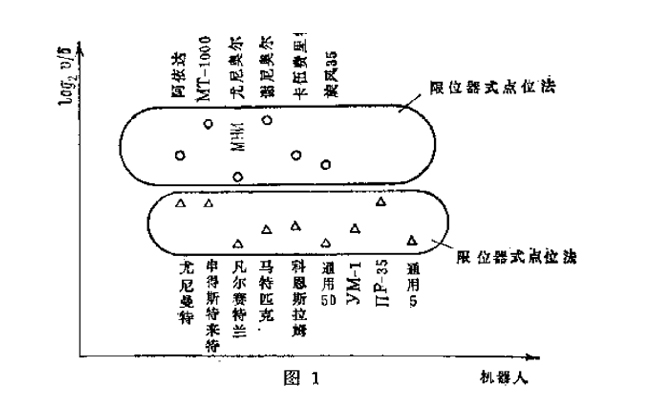 对于具有所研究的两种典型控制系统的机器人,所引用的不同的参数值决定了它们在那些范围里将得到优先使用。当供使用的点数不多且工作速度高时,采用根据限位器定位的方法控制和相应的循环控制系统。当速度不高而程序容量(供使用的点数)大时,采用点位控制机械手的方法和相应的点位控制系统。例如假若某些生产区域的参数log2v/δ如图2所示,那么,在**工作地域需要具有按限位器定位控制的机器人,而在第二工作地需要用点位方法控制的机器人,至于在第三工作地需要设置由二个具有按限位器定位控制的机器人。 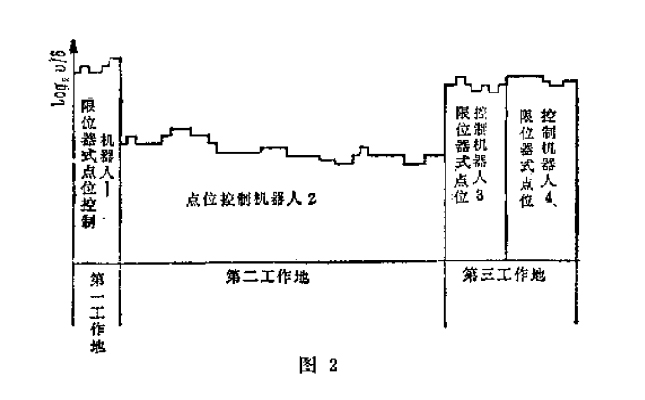 使用机器人所积累的经验已经证明上面所说的各点。采用限位器定位系统的机器人供高速冲压设备(几秒钟冲压一次)使用是成功是。在冲压机上料和取件中供使用的点数不多(进料器、冲压机、存料器)。在需要增加使用速度和点数时,常用有双手结构式的机械手,具有点位控制系统的机器人在金属加工设备或设备群中得到了应用。此时供使用的点数很多(特别是假若需要加工箱式和盒式工件时),并且由于机时比较多,所以工作速度也不太高。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |