
|
|
电弧焊机器人的点位控制装置特点介绍和结构分析 二维码
759
来源:JZ Robot网址://xhrxyx.com/h-nd-222.html 两个机械部分之间的运动自由度分开,这是所研究的机器人的结构特点。有三个运动自由度,一个属于位置控制器,二个属于机械手。机器人机械手用途是焊接简单的焊缝,即只要求沿直线或圆周运动的焊接。被焊接的零件用夹具固定在位置控制器的花盘上,机器人的程序穿在穿孔纸带上,因此,控制装置中要有读纸带的装置和输出装置。图1给出了机器人示教原理图。 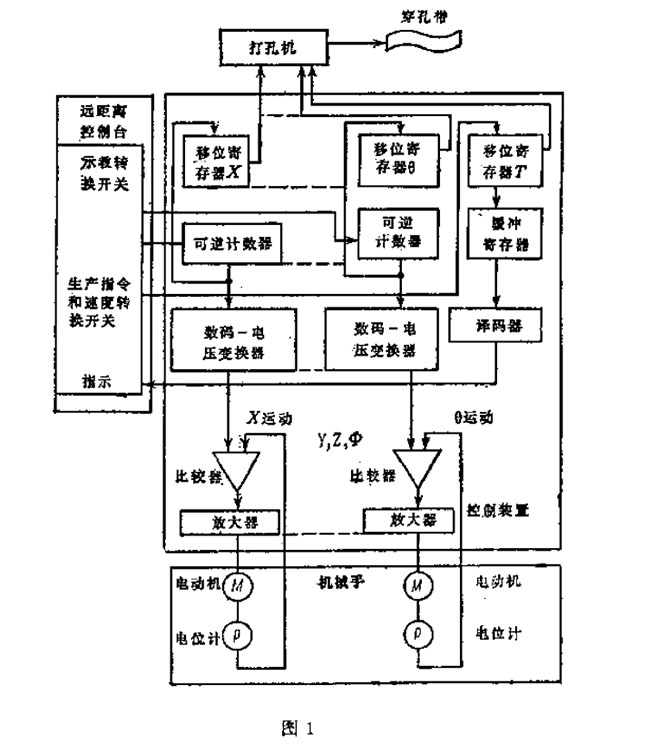 在示教状态下,操作者用远距离控制台上的转换开关,给可逆式坐标计数器加入一定数量脉冲,就能控制位置控制器和机械手的环节的运动。计数器中形成的数字码经由十二位数码-电压变换器变换成电压,之后加到伺服传动装置的比较器中。这一电压和从电位计传感器上得到的位置信号的实际值进行比较。由直流电动机组成的机器人伺服传动装置使上述比较出的差值信号趋于零,这样就使环节达到了所要求的位置。 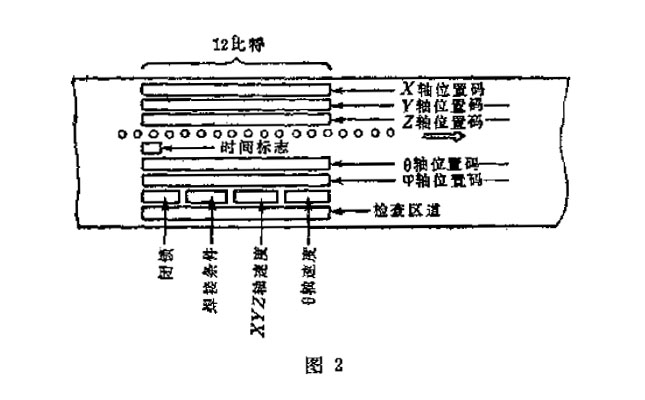 环节的位置数字码从可逆计数器输出端以并行码形式转储到移位寄存器Х——θ中。操作者借助给定生产指令和速度的转换开关,在移位寄存器Т中编排闭锁信息、焊接参数信息、沿Х、Y、Z轴和θ轴的运动速度的信息。在一个程序段信息编排好之后,根据控制台的信号,保存在移位寄存器中的信息以串行码形式送到穿孔机中,并穿在穿孔纸带上。图2标出来了在穿孔纸带上一个程序段信息的配置情况。 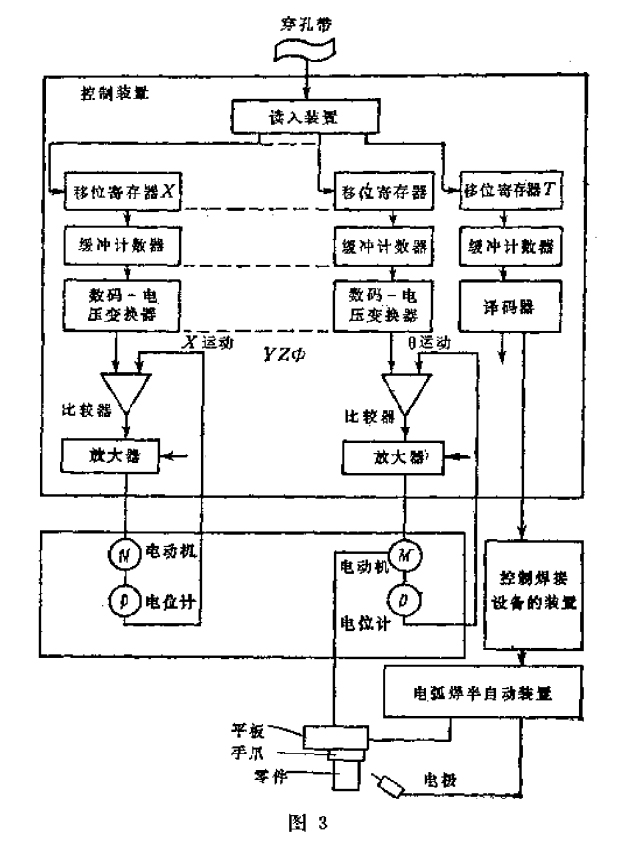 图3给出了机械手执行程序的原理图。从穿孔纸带上将信息以串行码的形式送到移位寄存器,之后以并行码形式转储到缓冲部件中(计算器和寄存器)。再后,按上述所说的方法处理坐标给定值。生产信息和速度信息送到译码器,并以一般方法进行处理。机器人的控制系统保证电极相对焊件的定位精度为±0.5毫米。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |