
|
|
工业机器人的轮廓控制装置的轨迹控制原理图介绍 二维码
603
来源:JZ Robot网址://xhrxyx.com/h-nd-224.html 沿空间连续轨迹控制机械手手爪,必须保证连续地、同步地实现各个坐标。建造轮廓控制装置有两种主要方法,这两种控制装置的区别在于存储和计算部分之间的相互关系不同。**种方法是基于以连续轨迹形式按每一个坐标存储所要求的位置信息。第二种方法是在于以轨迹上有限个主要点(基点)形式存储位置信息,并且用一定算法以内插法求这些点之间的连续轨迹。在**种情况下,控制位置中没有计算部件,但为存储所有轨迹要有大量存储装置。在第二种情况下,为存储各基点,存储装置的容量不大,但必须有机计算轨迹的中间各段的计算部件(内插器)。 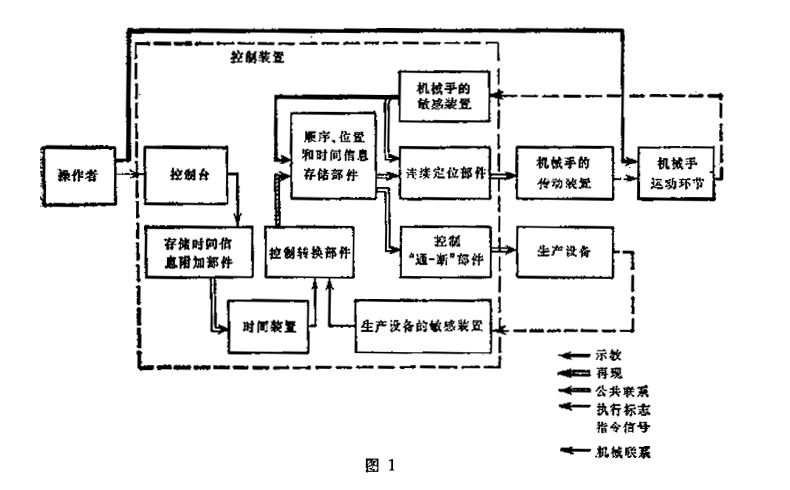 以连续轨迹形式存储位置信息的工业机器人的轨迹控制原理图如图1所示。所有程序信息集中存放在一个存储顺序信息、位置信息和时间信息的部件中。在控制工业机器人对所需要的信息容量不大的情况下,容易将信息存储到小型存储装置的磁带上(E系列“凡尔萨特兰”型机器人、“塔里伐”机器人),或者存储在小型存储器的磁盘上(“考俄特额-马蒂克”机器人)。有这类控制系统的机器人直接由操作者用沿要求的轨迹移动机械手的工作机构的方法进行示教。示数时。输入信息的顺序是;操作者-机械手-机械手的感受装置-存储装置。因为执行程序的速度和存储点位之间的增量成正比,所以当载有程序的器件以等速运动时,在示教过程中时间信息连同位置信息和顺序信息一起存储到存储装置中。补充的时间信息(如轨迹的形成速度)用改变载有程序的器件运动速度来引入(E系列“凡尔萨特兰”机器人、“塔里伐”机器人的控制装置)。在这种类型的控制装置中控制转换的部件乃是磁带或磁盘的传动机构,它们能保证载有程序的器件在形成轨迹时一定速度运动。对于其他类型的控制装置,控制转换的部件就是处理生产指令和延迟时间的一般线路,用调节载有程序的器件的传动机构的运动速度的方法引入补充时间信息,其顺序是控制台-时间信息存储部件-时间装置。 轮廓控制装置的控制部件被制造成在随动状态响应位置信息的连续定位部件和控制接通-断开的部件。在连续定位部件中,或者有比较给定的坐标值和瞬时坐标值的电路,或者有给出定量控制作用的电路(在采用步进传动装置时)。为了形成轨迹,连续定位部件应对机械手各环节的传动装置形成连续控制。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |