
|
|
工业机器人的继电作用式和连续作用式传感器介绍 二维码
831
来源:JZ Robot网址://xhrxyx.com/h-nd-171.html 在工业中首先得到实际应用的仍然的那些最简单的装置。这些装置在机器人的工作过程中,只测量周围环境的一个或几个变化参数。而比较复杂的机器人敏感装置还在研究试纸阶段。这样的感受装置能获得外部环境全部的、在结构上构成一体的参数总和,即所谓的“模式”。这在不确定的工作环境的三度空间中,对机器人机械手实现定向和完成对准目标的自治作用是必不可少的。 根据敏感装置所显示对象是几何的、物理的还是化学的,可将机器人外部信息敏感装置分成三种类型。 按照接收到信息时离信息源的距离不同,敏感装置可分为,超近距离的(接触的)、近距离的、远距离的(在工作区内)及超远距离的(超出工作区)。 超近距离作用的敏感装置能给出关于外界环境与对象相接触的信息以及接触特性的信息。接触传感器、滑动传感器(和人体每块皮肤上的触觉感受器官相类似)、当和外界环境中物体相互作用时产生生产力和压力信号的传感器都属于这种敏感装置。 近距离作用的敏感装置给出机器人机械手工作机构附近的物体的信息。其距离由直接接触(即零)到几十毫米,用无接触方式进行测量。这种装置有手爪定位传感器,各种近距离作用的测距仪等等。 远距离作用的敏感装置能获得整个工作区的外界环境的信息。测距仪、坐标方位仪、电视或其它类型的工业视觉装置都属于这种敏感装置。这些敏感装置给出的信息,为机器人提供了整个工作区的特征全貌,确定出到各种物体和各种障碍物的距离,各物体尺寸和外形等。 超远距离作用的敏感装置,主要是在移动式机器人中使用。 现在来研究某些典型的外部信息敏感装置。 继电作用式(限位式)和连续作用式接触传感器,在工业机器人**得到了实际应用。简单的继电作用式接触传感器的设计基础是微型开关。微型开关尺寸小,可供选择的产品种类多,所以在接触传感器中应用很广。接触传感器是由不大的薄片和微型开关构成的。薄片碰到物体就产生变形。薄片压住微型开关,使它动作。 连续作用接触传感器根据感应式变换器,或采用金属聚合组合材料制成。金属聚合组合材料有变形就会改变自己的特性,其体电阻能变化几个数量级,所以可制造小型的、高灵敏的接触传感器。 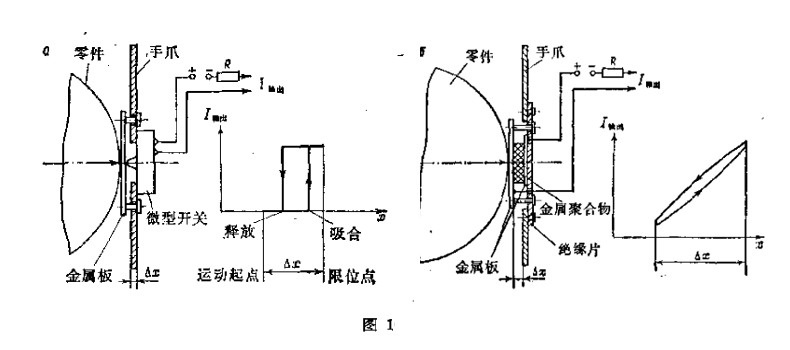 图1给出了继电作用(图α)和连续作用(图β)接触传感器结构示意图和它们的典型静态特征。 “石川电气技师”公司“灵活”型机器人机械手就是装备了继电器作用和连续作用的接触敏感装置。在焊接过程中用它测量零件的距离。继电器作用式和连续作用式的接触敏感装置的测距精度分别为±0.5和±0.1毫米。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |