
|
|
机械手传感器的选择及各类传感器的主要功能作用 二维码
2127
来源:JZ Robot网址: 在选择传感器种类时,除要考虑传感器主要参数和结构外,还要考虑电源问题,传感器和控制装置联结问题,信号预处理问题等。 用电位计作为位置传感器组成机器人机械手控制系统的测量部分,这是最简单的了。在这种情况下,用直流电源(稳压)供电。用两根导线使传感器与控制装置相连。传感器输出信号的功率足够大,所以信号通常不需要再进行处理。电位计在最简单的点位控制系统中应用很广。薄膜电位计很有使用前途。它的寿命长,可转到5亿圈还不坏。并且它的分辨率高。 数码变换器。例如光电数码变换器,在对信息进行数字处理的控制装置得到了应用,并且它有很高的测量精度。变换器用n+3根导线和控制装置相连,n为变换器的位数。传感器的输出信号通常需要进行放大。数码变换器价格昂贵,所以复杂的工业机器人的控制系统中才使用它。 现代工业机器人使用自整角机和旋转变压器是非常有发展前途的。这两种传感器分辨率高、抗干扰性好、外形尺寸小。高精度点位控制机器人机械手可使用双读数旋转变压器。以此为主体构成轴-模拟量-数码测量变换器,可以代替在对信息进行数字处理的控制装置中使用的数码变换器。由该变换器得出的信号。用5~7根导线输出,而且不需要再进行放大。用频率为400赫兹、正弦波形、非线性小于0.5%的专用电源供电。 因需要有专用电源和模拟量-数码变换器,就使系统的测量部分复杂了。但是假若合理地组成控制装置,控制系统的整个测量部分实际上可以简化。所以在数字模拟控制装置中(由列宁格勒加里宁工学院控制技术研究室研制的),当执行程序时,使用旋转变压器的信号。这信号在简单的轴-相位-时间区间变换器上交换成时城信号。在示教机器人时,用一个由计算器实现的时间区间-数码变换器,连续不断地把信号变成数码(不要协调读数)。结果使控制系统的装置相当简单,且价格便宜。 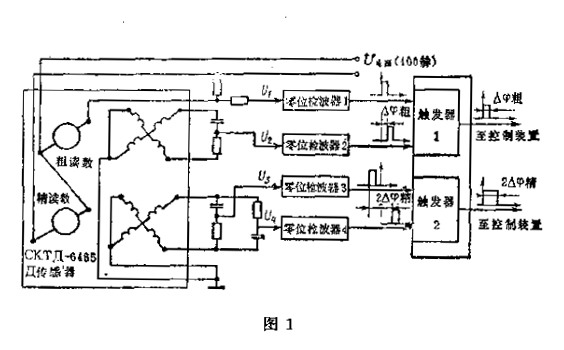 轴-相位-时间区间变换器如图1所示。变换器包括有CKT-6465型双读数正-余弦变压器、R-C移相电路、零位检波器以及两个触发器。粗读数正弦波电压U₁、U₂和精读数正弦波电压U₃、U4加给零位装置。由U₁和U₂、U₃和U4电压相位差可确定传感器转轴位置。粗读数用电压源U₁作为基准电压。在精读数通道中,由U₃与U4电压向相反方向的相位偏移,形成相位差。精读数电路保证有很高的测量稳定性。零位装置把正弦电压变换成矩形脉冲电压,脉冲前沿和正弦液电压过零点那一瞬时相重合。之后,将脉冲加给触发器输入端。在触发器的输出器产生新的脉冲,这脉冲宽度和传感器轴的转角成正比。在上述变换器的基础上,为“列宁格勒机电工厂”联合企业成批生产的工业机器人的规格化控制系统研制了具有匹配读数的轴-数码变换器。这种变换器位置测量精度是14位(在传感器轴上)。 在采用限位器点位控制系统的机器人中应用的行程开关可以是微型开关无触点行程开关、密封簧片继电器(磁控接触器)。 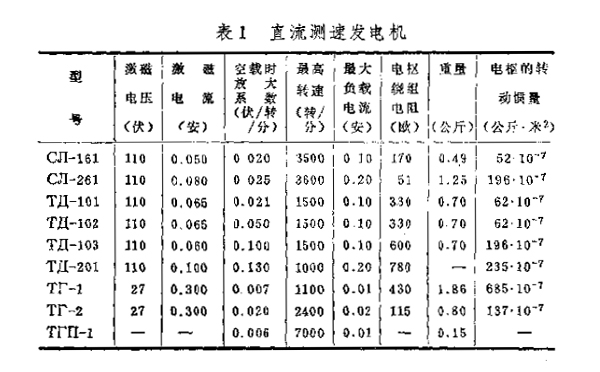 速度传感器主要用在具有机电传动装置的工业机器人中,其目的是提高保持某一速度的精度和增强传动装置特性的硬度。速度传感器多半是用直流测速发电机。表1给出了苏联产生的某些测速发电机特性。还要位置和速度传感器合为一体的结构形式。日本的“三菱-八幡”喷漆机器人所用的十位光电数码传感器,为了产生速度信号,附有一长带,其上均匀刻有4096条刻线。根据产生脉冲的频率就可确定运动速度。 为了防止过载,机械手各环节上都装有力传感器,还有的以力传感器按零件重量调节位移速度。通常是用应变仪传感器作为力传感器。在机器人机电传动装置中,常常根据电机电枢电流测量传动装置负载大小,以防止传动装置和机械手过载, 外部信息感受装置用它获得在控制机器人完成一定的生产操作过程时需要知道的外部环境状态、性质和参数的信息。 所谓外界环境是指机器人工作区内生产环境,包括在此区域内的物体,如生产设备、机器人操作的产品、其它机器人和人等。 板材和扁平零件码垛就是用外部信息感觉装置的一个典型例子。在这种操作中,要求用装在手爪上的接触传感器确定垛顶高度。 另一个例子是用机器人进行电弧焊。此时要求精确地保持焊缝和电焊条之间距离。由于焊件向两边撇开(它对产生质量影响不大),又因加热时零件尺寸要求,所以实际上不能按预先设计的焊迹焊接。这就需要用专门装置测量真实的焊缝位置,并且在控制焊条移动时考虑焊接的变化。 在抓取和运送易碎物品时,需要控制和限制物品的力,使它刚好不从手爪中滑落出来,这种工序要求手爪上安装能测算手爪对物品压力的感受装置,并安装显示物体滑动的装置。 最复杂的工序是机械装配工序,需要用有知觉的机器人来完成。完成这样的工序必须对装配的零件进行精确地定位和定向。根据感受装置得到的内部信息进行程序控制不能保证要求的装配精度。所以机器人手爪上要安装敏感元件。它能确定零件相对手爪或装配在一起的其它零件的位置。精度可达到零点几或零点零几毫米。在装配零件过程中,对施加的力度加以检查,防止零件歪斜时把它卡住。这就要求在机器人工作机构上安装测量力的感受装置。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |