
|
|
机器人机械手爪上装近距定位传感器的种类和特点 二维码
823
来源:JZ Robot网址://xhrxyx.com/h-nd-172.html 图1为若干个接触传感器配置在机械手爪上,使得整个表面都有了触觉。图1给出的是装有24个触角传感器的有知觉的手爪(图中1、2)。这种手爪测定到物体(图中4)的距离精度为0.5~0.7毫米,而测定物体方向的精度为±15°。除触角传感器外,手爪上还装有近距定位光学传感器(图中3)。 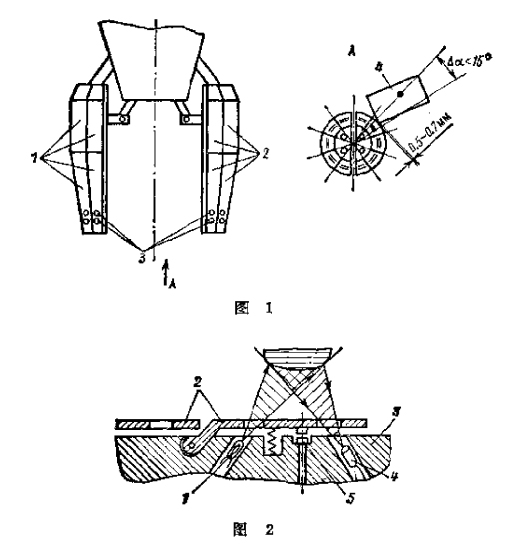 图2是传感器的装配图,其中1-白炽灯;2-触觉传感器;3-壳体;4-光电二极管;5-触点。为了能够安装大量的传感器。把触角和近距定位传感器的元件装在手爪结构之中。 用特殊组合的接触传感器组能够获得关于被物体形状的信息。为此,有各种有效的触摸物体的方法。其中有把9个具有线性特性的敏感元件按一定阵式排列,由此可以判明圆柱、球、圆锥、立方体、角锥等物体的形状。物体尺寸变化几倍也不会影响判定结果。 组成压力传感器的主要部件可以是应变仪,也可以是金属聚合材料,或者是对压力敏感的半导体元件。传感器通常配置在手爪的内表面上。这些传感器配置成一条线或配置成一定阵式,以便获得手爪表面压力分布情况的信息。当手爪抓起固体物品时,手爪表面压力分布特性与手爪表面和零件相接触的程度是对应的。因而,压力传感器的信号也可以用来确定手爪抓住的零件的形状。压力传感器特性在被测压力的整个范围内都应是线性的。 当被抓住的物体相对手爪挟口有相对移动时,滑动传感器就产生信号。此外,也常常用滑动量的大小。获得滑动信息的基本方法有: (1)分析针状敏感元件沿被滑物体表面移动时的振动; (2)把滑动位移变换成与测量相联的滚轮的转动; (3)在手爪上装上一排压力传感器,分析手爪的各手指之间压力分布变化情况。目前,这种方法是很有发展前途的。  近距定位传感器装在机器人的机械手爪上。用它判定手爪外表面几十毫米距离之内有没有物体。这种传感器通常是电磁式的、光学式的、超声波式的。 电磁式传感器的工作原理是,当传感器靠近物体时,记录出电磁参数变化。这种传感器的优点是精度高、可靠性强。但是,它只能对金属物体起作用。日本的“日立”焊接机器人的机械手上安装了二个感应式传感器。用它来测量到焊板和互相垂直放置的零件隔板的距离。利用传感器的信号可以准确地监视零件的对接。 光学式传感器由光源和接收物体反射光线的光敏元件组成。光源是一个能装上聚焦透镜的小型灯泡。可用光电二极管、光电晶体管作为光敏元件。为减少外界光源的影响,传感器的光通量要加以调制。光学式传感器在手爪上的配置以及各传感器的安装情况如图1和图2所示。6个光学式近距定位传感器分散地安装在手爪的手指上。用它们来测定在距离为10~25毫米之内的物体、障碍物和其它物体的外表面的位置,其准确度可达到2毫米。在手爪的内表面分散地安装着4个光学传感器。这些传感器是接收透过手指之间直接射进的光线而工作的。这样就能检查手爪是否抓到了物体,并且能大致地确定物体的位置。 超声波近距定位传感器也是由信号发送器和接收器组成的。根据反射回来的超声波信号来发现物体和测定到该物体的距离。与光学式传感器相比,超声波传感器有如下优点:可以发现透光的物体;振动发生器的工作寿命实际上是没有限制的;它的指示与照明度无关;灰尘、蒸气以及其它的环境因素对传感器影响不大;在水下也能测量。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |