
|
|
工业机器人控制装置的基本部件和原理线路的分析 二维码
749
来源:JZ Robot网址://xhrxyx.com/h-nd-218.html 现在来分析控制装置的基本部件,即定位装置的原理线路。定位装置(图1)是用来对给定装置(是十二位的二进制码)与瞬时装置(是相移)进行比较,并形成控制传动装置的信号。 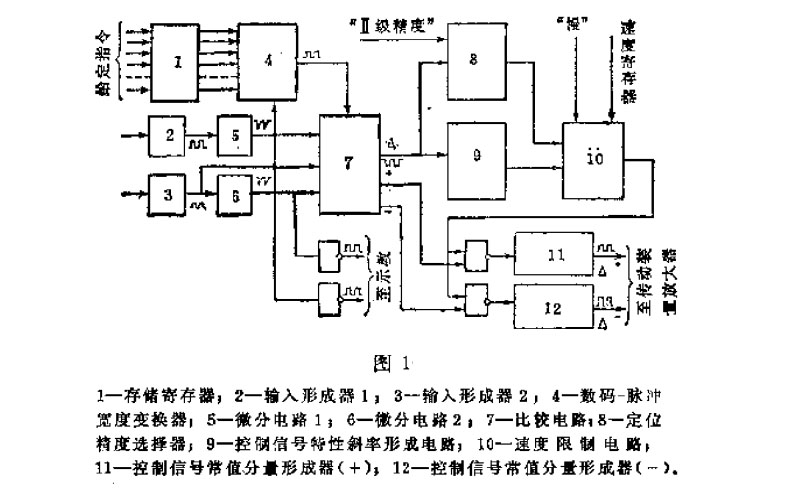 定位装置包括:存储寄存器、数码一脉冲宽度变换器、输入形成器、微分电路、比较电路、定位精度选择电路、控制信号特性斜率形成电路、速度限制电路、控制信号异常值分量形成器。 由运算存储器给定的数码加到存储装置的寄存器中,进而送到数码-脉冲宽度变换器中。这一变换器是由一个计数器和一个数码重合电路组成。从数码-脉冲宽度变换器输出端给出的位置信号总是带有相应宽度的脉冲,该脉冲加到比较线路的输入端。 环节的瞬时位置的信号以幅值为12伏的脉冲从轴-相位变换器加到输入形成器2中去。由形成器的输出端取得正极性的、幅值为4伏的脉冲,加给微分电路。当输入脉冲反向下降时(脉冲后沿),在微分电路中形成短脉冲ф1和ф2脉冲之间的时间间隔比于环节的瞬时位置。 脉冲ф1和ф2从定位装置传送到示数装置,以便形成环节瞬时位置的数码。脉冲ф1同时还加到数码脉冲宽度变换器上,以使数码时间间隔变换电路同步工作。由几个寄存器和重合电路组成了比较电路,由这电路形成差异信号。差异信号的形成是脉冲的宽度和运动的符号。比较电路输出的差异信号加到控制信号特性斜率形成电路和定位精度选择电路上。 控制信号特性斜率形成电路是一个能调节放大系数的脉冲宽度放大器,它能保证形成输出特性。精度选择电路是根据延迟脉冲前沿原理进行工作的。当工作在Ⅰ级精度时则没有延迟。当工作在Ⅱ级和Ⅲ级精度时,脉冲前沿有延迟,它保证在到达给定点之前20′或3°就产生出定位结束信号。 速度限制电路根据被调节设备确定由信号特性效率形成器送来的脉冲的宽度,从而给出了环节运动的**速度。固定不变速度形成器给定环节所具有的低速水平,以这一速度趋于定位点。控制信号常值分量形成器是一个单向振子,它根据输入脉冲后沿形成速度不变的脉冲。 定位装置所有电路都以400循环/秒工作,这就保证装置抗干扰性好。由于有了新型电路,总共用30个微型电路和数量不多的离散组件就可构成完成一整套功能的定位装置,如完成数码时间间隔变换。信号比较、被调节的输出特性的形成、给定执行精度等级等等功能。与用数字方法实现上述功能的情况相比较,电路和组件的数量可以减少近1/2。 按照在“机器人-Д”的装置中用过的线路技术解决问题的方法,列宁格勒加里宁工学院研制了控制“西格玛”工业机器人的定位装置。存储装置是由К519系列集成半导体微型电路组成的,这种集成电路能够电气更换信息和在电源断开后保存信息。存储装置具有模片形式的结构,并且具有用模片扩展存储容量的可能性,其容量可由256个十六位数字扩展到**容器2048个十六位数字。机械手运动自由度的位置(坐标)的信息用比较简洁的方法存储,即采用了构成长度可变的程序段的方法。当存储机器人在示教过程中的程序时,不需要执行的运动自由度的坐标就不存入存储器中。仅仅在必须精确实现位置的情况下方存储精读坐标值。为此,在程序段的控制语句中规定实现每一个坐标的标记。能存储在存储装置中的点位的数量N用如下公式计算: N=Q-P/n+1 式中;Q----存储容量;P----无“运动”指令程序段数;n-----参与运动的坐标平均数(考虑存储精读数)。 在“西格玛”工业机器人机械手控制装置中,扩大了根据内部和外部条件改变程序过程的能力。这就使得能够完成装箱的工作以及根据从生产工段发来的外部信号灵活地改变程序的进程。程序分支由在程序的任何地方加入条件转移指令来保证。根据紧跟转移地址后的一个地址完成程序复原。以无条件转移指令保证程序的自由安排(如增加新的部分,去掉不必要的部分),这种指令同样也可以加在程序的任何地方。 这种装置即可以用双读数的,也可用单读数的感应式СКТД-6465Д型、ВТМ-1В型正余弦旋转变压器及БС-15A型自整角机进行工作,也可以用具相似线路的其它类型传感器工作,电路的电源频率为400赫兹、供电电压为18伏特时总共需要不大于1安培。传感器工作在移相状态。这装置有成对方式工作的传感器(旋转变压器及自整角机)的信号形成器,信号形成器从装置中分出来,放置在机械手上靠近传感器处。一个机械手上可以采用不同类型的传感器。 制动特性在3”~90”范围内进行调节,且与各个坐标无关。制动特性可从线性形式变到四次曲线形式。规定在这种装置这能编制四个定位精度等级的程序。在零级时,定位精度取决于系统测量部分的**分辨率,对Ⅰ~Ⅱ级精度,定位精度分别为±2.6、±20’、±3”。 在控制机械手的传动装置时,要保证能平滑地加速和制动。被控坐标数目3~8个,此外还加上手爪的控制。该装置做成柜台式结构,尺寸为350×400×1100毫米。装置的控制-计算部分是以К-155系列集成微电路为基础,采用有中等集成度的元件制成的。示教和手控台装在控制板内,具与控制装置分开,以便于进行机器人示教。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |