
|
|
工业机器人的液压和气动相结合的复合式传动装置 二维码
900
来源:JZ Robot网址://xhrxyx.com/h-nd-186.html 在机器人中应用复合式传动装置直至目前仍是非常有限的,其原因首先就在于,机器人的使用管理复杂,因而在利用这点传动装置时就降低了机器人的可靠性。机器人中最常见的复合式传动装置的液压和气动相结合的传动装置。在各个传动装置同时工作的情况下,当气动马达作为执行马达时,液压传动装置可以用来改善动态特性,特别是用来稳定输出环节的速度和提高整个传动装置的出力系数。这样的组合就是气-液式传动装置。假若采用液压马达作为执行马达,那么复合系统中气动传动装置就不能用液压泵站作为能源了。这种复合传动装置就是液-气式传动装置。 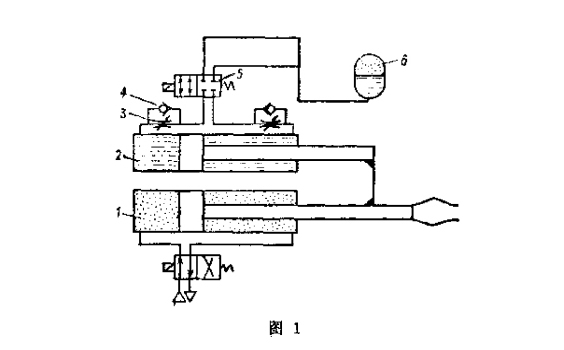 图1给出了具有液压调节速度和液压定位的机器人机械手一个运动自由度的气动液压传动装置原理图。 当空气进入气缸1的一个腔内时,在液压配流器位于左边位置时,活塞杆外移,其速度取决于相应的液压节流阀3的调定值,所以就能够保证有稳定的运动速度。单向阀4能保证液体自由地进入液压缸2的充液腔内。为了补偿液压缸两腔的容积差和漏油,图中设置了油液储能器6..液压配流器能够起到对机械手进行定位的液压闭锁作用。假若采用дд型与电控信号程正比的节流阀,那么,当所研究的传动有位置反馈时,就能用于构造具有点位控制系统的工业机器人。在这种情况下,在定位范围内保证稳定的“爬行”速度条件下,能够用配流器5,根据位置传感器的信号使工业机器人机械手在定位点上定位。 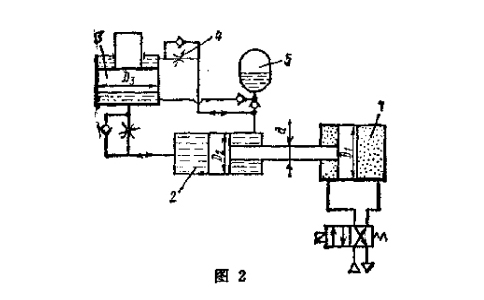 图2给出液压气动传动装置原理图。“阿乌托赫恩”(Аутохенц)、“ПР-10”和“旋风3Б”型机器人的垂直方向运动就是使用与这相似的原理,这三种机器人的能源是气动管道系统。在这种情况下,液压传动装置保证垂直移动并起放大器作用。 当往气缸1的活塞腔内供气时,液压缸2的活塞腔内就产生压力。液体进入到执行液压缸3中。这时缸3的活塞移动,使机器人机械手有相应的运动。若气缸的活塞反向运动液体进入缸3的有杆腔内。节流阀4能保证执行液压缸的速度。蓄能器5来补偿缸2的有杆腔和活塞腔的容积差以及漏油。现在来求液压执行缸3的活塞杆所受的力。 液压和气动的复合传动装置的一个根本优点就是能够在小于0.1米/秒和大于1米/秒很宽的范围内稳定地调节速度。 理解描述液压和气动传动装置的方程式就能对所研究的复合式传动装置的动力学进行理论分析。根据对具有循环控制的液压和气动机器人计算所给出的数据,就可列出描述液压和气动传动装置的方程式。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |