
|
|
机械手的开合度和动力计算公式以及运动受力分析 二维码
3542
来源:JZ Robot网址://xhrxyx.com/h-nd-162.html 机械手的开合度: 若仅以手臂的摆动来代替其开合及让位,则手臂的开合度必须相应增大,使得手头足以退让筒体的运动轨迹。 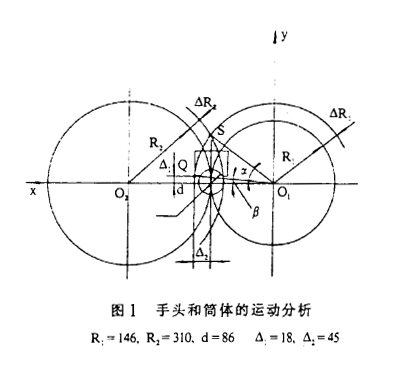 手头和筒体的运动情况如图1所示。根据圆的运动方程可以得到机械手中心与筒体中心的运动轨迹分别为: x₁²+y₁²=R₁² [x₂-(R₁+R₂)]²+y₂²=R₂² 由图1可以看出,手头最易干涉处为Q点,而简体最易干涉处为简壁外缘,则其运动方程分别为: x₁²+y₁²=(R₁+△R₁)² =(R₁+△₂)²+△₁² [x₂²-(R₁+R₂)]²+y₂² =(R₁+△R₁)² =(R₁+d/2)² 由于R₁+△₂》△₁,则式(3)可以简化为 x₁²+y₁²=(R₁+△₂)² 将式(5)代入式(4),整理后得 x=(R₁+R₂)²+(R₁+△₂)²-(R₂+d/2)²/2(R₁+R₂) 则 y=±√{(R₁+△₂)²-[[(R₁+R₂)²+(R₁+△₂)²-(R₂+d/2)²]/2(R₁+R₂)]²} 代入相应数值计算,得x=138.25,y=±131.79 则α=arctan|y|/x=arctan131.75/138.25=43.63° β=arctan△₁/(R₁+R₂)=arctan18/(146+45)=5.38° 因此,手臂的最小摆动角度为 α'=α-β=43.63°-5.38°=38.25° 则机械手的最小计算开合度为2α',等于76.50°。 考虑到其计算偏差及构件的制作误差,为安全起见选取手臂的实际开合度为90°。 机械手的动力计算: 选用铰支单活塞杆液压缸,直径Φ40毫米,引程75毫米。扭簧材料选用65Mn,工作扭频1500~1860kg·mm,极限扭矩2200kg·mm,工作扭转角度54°48'~68°。 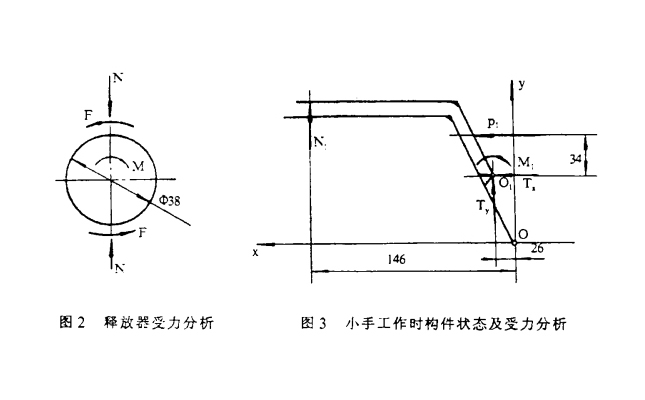 小手工作时的驱动力经测算可得,释放器端盖旋入时的**扭矩为600kg₂mm,由图2释放器简体的受力分析可知,在**工作扭矩下筒壁的摩按阻力为 F=Mmax/d=600/38=15.79(kg) 此时所需的正压力为 N=F/μ=15.79/0.15=105.26(kg) 小手头夹紧释放器小转臂的受力情况如图3所示。此时大、小手头分别夹压在保护筒和释放器上,大、小转臂之间有扭簧作用而产生扭矩,其受力平衡方程为 ΣMo₁=P₁·34-N₁(146-26)-M₁=0 因为N₁=N 则p₁=(M₁+120N)/34=(1860+120×105.26)/34=426.21(kg) 液压机无杆腔液压油所需的压强为 P₁=P₁/πr²=426.21/2²·π=33.92(kg/cm²) 考虑到其安全性,油压应在40kg/cm²以上。 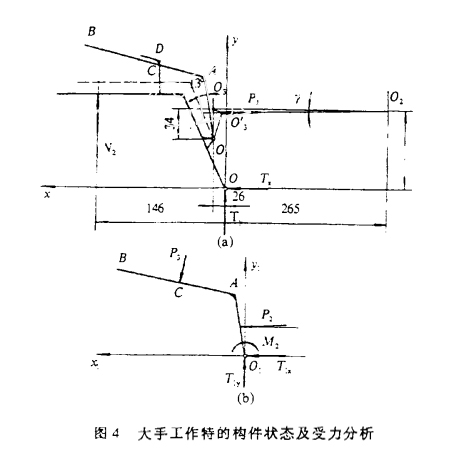 大手工件时的驱动力: 大手工作时的构件状态及受力情况如图4(a)所示。由于大手头夹紧保护筒,小手头为退回状态,则小转臂也随之回摆一定的角度,这将使得液压缸活塞杆对小转臂力的作用点O₃点移至O₃'点,其力的作用线也将随之转动一定的角度7。 7=arctan34(1-cos13°)/265=0°11'18〞 取小转臂O₁AB的隔离体,受力状态如图4(b)所示。若要使小转臂O₁AB靠紧在挡板D上,则液压驱动力P₂对O₁点的矩应小于扭簧产生的力矩M₂。设定液压系统的工作压强为3.2kg/cm²,则 P₂(34·cos13°·cos7-34·sin13°·sin7)=1331(kg·mm) 小于扭簧的工作扭矩1500kg·mm。因此能够可靠地工作。 由图4(a)的受力分析,可以列出组合件的平衡方程 ΣMo=P₂[(61+34cos13°)cos7-(26-34sin13°)sin7]-N₂·146=0 大手头对保护简体的握持力为 N₂=P₂/146[(61+34cos13°)cos7+(26-34sin13°)sin7]=25.94(kg) 满足手头的导向要求。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |