
|
|
组合握持机械手的设计与应用及其工作原理的介绍 二维码
676
来源:JZ Robot网址://xhrxyx.com/h-nd-161.html 自动上盖大体上可分为三个过程,即输送、投放和旋紧过程。输送和投放采用送盖装置进行,而盖的旋紧则利用另外一套立置机械手来完成。以上三个环节中,盖体投放位置的准确程度将直接影响其是否能够可靠的旋入。为此需加设导向机构。在小盖投放前,释放器需进引定位、夹紧和导向三个规定程序,而大盖旋入时,因保护筒随输送转盘已经定位和锁紧,因而仅需要导向。以上程序均设定由横向握持机械手完成。 一般,简单的握持机械手应具有二个自由度,而手头抓握过程的开合运动和远离工件的移动。为减少机械手的数量,有利于结构的空间布置,可采用组合套装形式,将小手头设置于大手头内部。为使两种规格盖体旋入时同心,应选择保护套筒为基准对释放器进行定位和夹紧。这将使得握持机械手的自由度增至三个,即大手头的开合运动、小手头的开合运动及手头远离工件的移动。 工作原理如图1所示。其中件1和件4为对开合小手头。相对于件2和件3大手头作相对移动(A₁、A₂),大手头2、3分别与手臂6和5固联,且与伸缩杆7铰接于0点,可相对于杆7对开合摆动(B₁、B₂)。 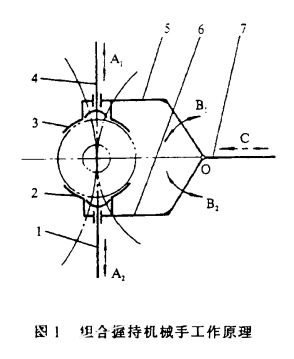 从图1中可以看出,随着手臂5和6向外侧摆动量的增大,手头2和3将逐渐远离筒体。当其摆动量足够大时,即使杆7不产生回缩运动。手头也可以让开筒体的输送路线,这将使握持机械手的自由度得到简化,由原来的三个自由度减少为二个自由度,即小手头的开合运动(A₁、A₂)和大手头的摆动(B₁、B₂)。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |