
|
|
气动小型机器人机械手控制装置的工作原理和介绍 二维码
1408
来源:JZ Robot网址://xhrxyx.com/h-nd-202.html 图1中给出了МП-9型气动小型机器人控制装置作用原理。这种小型机器人的机械手有三个运动自由度,即水平移动、转动和垂直移动,此外还有手爪运动。所有这些自由度都是从一个限位器运动到另一个限位器。 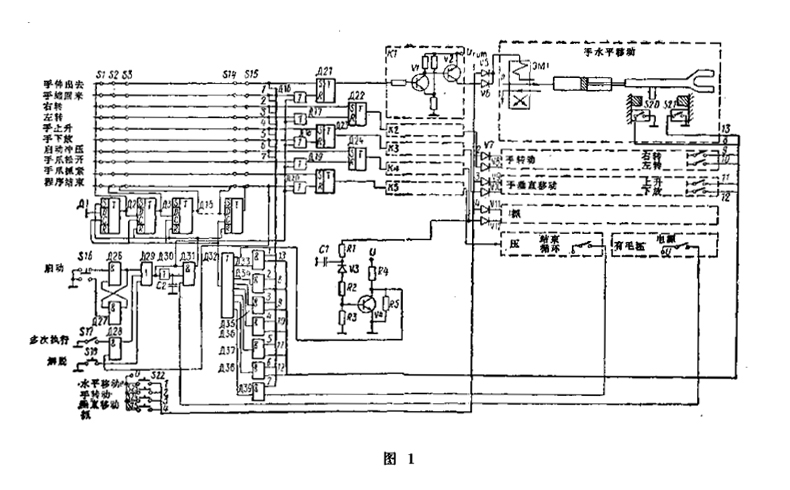 程序指令顺序信息存放在контравес型平面转换开关S1~S15上。整个程序编成15步,每一个指令为一步。十个数字指令中,包括八个控制机械手的手爪和环节运动的指令,一个“冲压启动”指令和一个“程序结束”指令。用K1~K4无触点开关对机器人气动阀的电磁铁进行控制。通过开关K5给出冲压启动的生产指令。 用移动寄存器作为转换部件。移位寄存器是由Д1~Д15触发器、Д33~Д39重合电路和Д32或门电路构成的。由C1,R1~R5,V3,V4组成时间延迟整形电路。 这一控制装置按下述方法工作。在转换开关S1~S15上存入要求给出的指令的顺序以后,操作者在控制台上按下“启动”按钮S16。由重合电路Д26和Д27组成的触发器在1的输出端发出的信号加到或门电路Д29上。信号从或门电路输出端转送到执行触发器Д21~Д25,而在电容C2上延迟的信号加到重合电路Д31的输入端。只有从送料机的传感器发出抓取的初始位置上有毛坯的信号时,该电路的输出端才产生信号。 重合电路Д31输出端的信号使转换器触发器Д2~Д15处于初始状态,而**步触发器Д1置1。触发器Д1的1输出端电位加给转换开关S1,于是开始执行**步。例如,假设在**个程序段中,装定成“手伸出”指令。这时,信号加到触发器Д21的输入端,并使它处于1状态。信号也同时加到重合电路Д33的一个输入端。从触发器Д21输出端取得的电压加到开关K1输入端,开关K1动作,并将气动阀的电磁铁ЭМ1接到电源U上。 气动缸使机械手的手伸出来。当运动碰到限位器时,开关S21(簧片继电器)动作,而且在重合电气Д33的第二个输入端产生信号。由重合电路输出端取得标志已执行了程序的信号,经过或门电路Д32加到转换器触发器的同步输入端上。1从触发器Д1转写入触发器Д2,开始执行第二步,依次类推。 因为在МП-9型机械手的手爪上没有终端开关,所以在手爪上,当执行指令后,根据时间延迟整形电路(晶体三极管V4)输出端的信号进行转换。 当一个循环最后一个指令执行完以后,就产生一个“程序结束”指令。假若从控制台不给出“多次执行”(翻转开关S17),那么重合电路Д28的输出端就没有信号输出,所以只执行一个循环。当S17翻转开关放在“多次执行”指令位置上,根据重合电路Д28输出信号而开始执行下一个循环,一直继续下去,也就是控制装置不断地自动进行工作。当从送料机上抓取最后一个毛坯时,控制装置完成最后一个循环,此后由于重合电路Д31输入端不再产生信号,所以完成最后一个循环后,机械手将停在原始位置上。 当闭锁自动工作时,用“解脱”按钮S18使线路进入原始状态。用按钮S22~S25通过二极管V5,V7,V9,V11,从控制台直接给气功调的电磁铁供电,实现用手控制机械手的运动。在此情况下,执行触发器Д21~Д25装定在初始状态。 这一控制装置是由21个K155系列微型电路和少量分立元件组成的。在生产条件下对МП-9型机器人的控制装置的实验样品进行试验表明,控制装置可靠性高,编制程序容易,使用性能好。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |