
|
|
机器人机械手不同类型气动传动装置的介绍和特性 二维码
644
来源:JZ Robot网址://xhrxyx.com/h-nd-180.html 现代机器人的发展趋势之一是广泛采用具有简化运动学特性(当小于5个自由度时)和循环控制的专用机器人,因为完成最简单操作的机器人可靠性高,价格便宜。使用长行程的气缸和旋转式的气动马达,从结构上解决了这种机器人的问题。这样,不用中间运动学环节和中间传动学装置就能直接控制执行机构。这种单自由度的机器人的气功传动装置由执行马达、配流装置、速度节流调节器和减压阀组成。气动系统的供气由一个总气压源供给。在个别运动自由度的供气中可有附加的减压阀,以便使供气各管道中的压力能调节到要求值。ЦРГП型气缸可以作为气动上下料机械手用往复式气缸的例子。ЦРГП型气缸可保证在工作速度小于1.5米/秒的情况下调节往复运动。 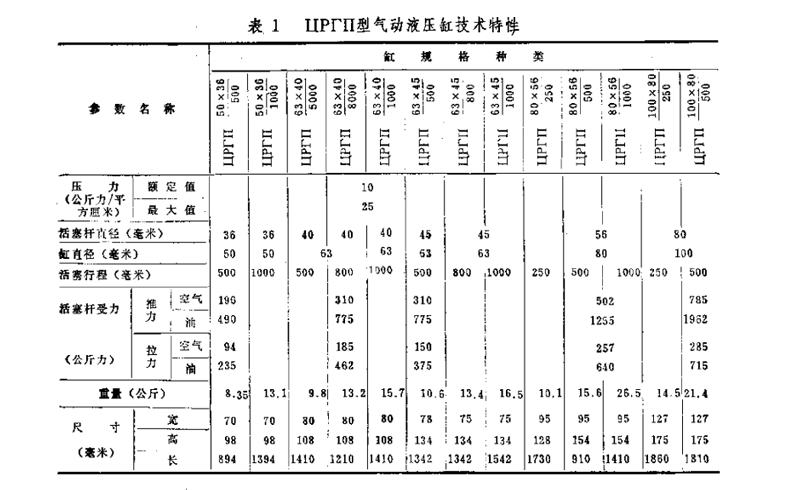 这种气缸是由精密的圆管制成的。橡胶密封和氟化塑料垫圈结合使用可使活塞和活塞杆的摩擦力很小。ЦРГП型气缸的技术特征如表1所列。由于装有制动装置,所以在这些气缸中可以调节活塞杆行程末端的制动状态。这种气缸最突出的特点是密封性好、寿命长和摩擦力小。推荐用ДПГ型马达作有限转角的气动马达。下面研究液压传动装置时再介绍这种马达装置及其技术特性。专为机器人气动传动装置研制了ЦДΠ型柱塞式旋转马达。它和ДПГ马达一样用来实现机器人机械手机构的有限转角运动。它以齿轮齿条为主要结构。 齿条在这里的作用是充当两个同轴气缸的活塞杆。安装有选择齿轮条传动间隙的装置。表2给出了研制出的马达的技术特性和尺寸。 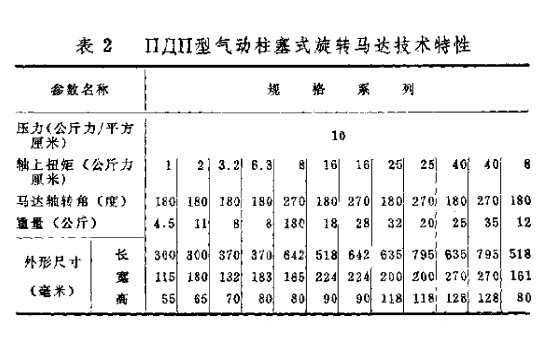 在气动传动装置中,用滑阀和阀门作分配装置。建议采用以气-电控制的,且公称通径8~16毫米的4152550型两位置或三位置的滑阀作为滑阀式气动配流元件。表3给出了这种类型滑阀的主要技术特性。 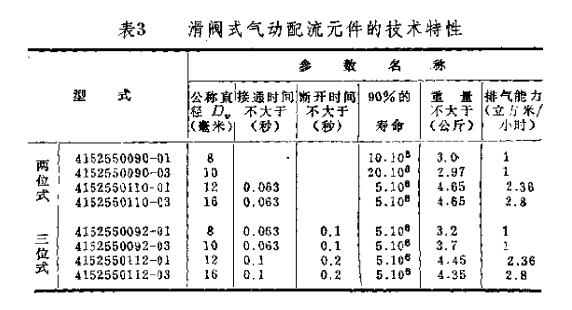 气动配流元件最低的允许工作压力是2.5公斤/平方厘米。 在所研究的用电控制的配流元件中,通过电-气阀门传递控制压力。阀门是根据传递到电磁铁线圈上的电压而动作的。没有控制信号时,三位置式配流器的滑阀处在中间位置。在中间位置上,所有气流通道都被关闭。当有控制信号传入时,滑阀将处在一个极限位置。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |