
|
|
机器人的定义和结构研究以及机器人机械手的介绍 二维码
886
来源:JZ Robot网址://xhrxyx.com/h-nd-164.html 尽管机器人技术发展很快,但至今“机器人”这一术语仍无统一的、固定的概念。目前,这个术语的含义很广,而且很直观。有些人甚至把各种类型的控制论游戏装置主从机械手、机械翻译系统、会下棋和能讲谱曲的电子计算机等等也都看成机器人。 一般来说,机器人可定义为完成机械动作的通用自动机。到目前为止,原则上仍是把完成体力劳动的人作为构造机器人的模型。机器人的特点是借助于感受装置和执行机构能主动,而且有目的地和外界进行信息的和物理的相互作用。机器人对外界物体产生作用,并能在外界环境中行走。机器人的各个部分(分系统)由信息处理装置(如电子计算机)联结成统一的系统。在结构上,机器人的各个分系统组合成不同的机器人。 机械手是机器人主要的(目前还是**的)执行机构。但是,可以设想用强电磁场来操纵物体,也就是把强电磁场作为机器人的执行机构;可以设想让强大激光装置按所需要的方式对周围物体进行作用,也就是把强大激光装置作为机器人执行机构;可以设想其它类型的机器人执行机构。当然,在任何情况下,对外界物体产生灵活作用的执行机构是机器人必不可少的组成部分。本书下面讲到执行机构时就是指机器人机械手。机器人的另一个必备的特征是通用性。不具备通用性就不能算做机器人。举例说,只有一种程序的加料器,虽然是自动机机械手,但是由于功能不能够调整,不应称作机器人。不需要人参与操作,有自治能力也是机器人必备的特征。不具备这一特征也不应该认为是机器人。举例说,由人远程距离控制的充当电视摄像机的机械手以及其他各种类型的主从机械手,都不能列入机器人之列。 把机器人定义为完成机械动作的通用自动机,这是对所研究的新型机器下的广义定义。当然,由于自治程序及操作人员参与特点的不同,各类机器人之间存在着本质上的差别。甚至机器人本身还有分工,这种分工是根据它们具体应用的特点而决定的。因此,各类机器人的通用程度有很大差别。 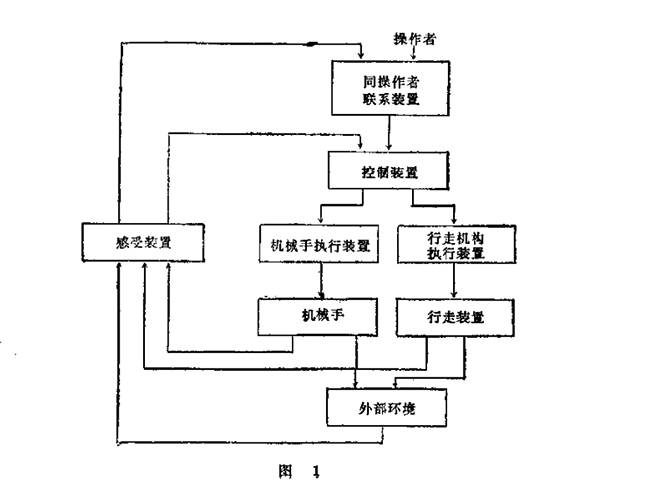 现在来研究机器人的一般结构(图1)。机器人的推进作用是由执行机构来完成的,通常,机器人的执行机构包括机械手和行走装置。 机械手是多环节开环机械装置。它有完成旋转和往复运动的关节,其自由度数目为3~10。这个机械装置的最后一个环节(即工作机构)是手爪或其它任何专门的生产机械,如真空吸附盘、喷雾器、自动扳手等等。为了能够在各环节位移最小的情况下保证执行机构有平滑的移动轨迹,必须正确地分配机械手传动链的运动自由度。为此,机械手必须满足如下基本要求: (1)可随意改变手爪位置和方向; (2)在保持手爪位置和方向的条件下,可随意改变机械手运动链在空间的形状; (3)用于改变手爪方向的运动自由度不能对手爪终端位置有明显的影响。 要按照机械手在工作范围内的工作要求,即服务质量,来选择各环节的长度。工作系数可作为一个质量标准。根据所要求的工作系数的大小确定各环节的长度,和确定各环节在机械手传动链中的配置。 在确定手爪的结构使,通常要考虑某些定型工作。有的手爪做成勺罐形,有的有两个或三个手指,有的有扰性手指等等。工作机构可同时带有信息传感器。这种信息传感器能确定出操纵对象的各种参数,并能发出故障警报等。 机械手和行走装置的执行机构是每个运动自由度的传动装置(参看图1)。传动装置主要有三类;电动的、液压的和气动的。由于空气压缩性大和制造良好的气动随动系统相当复杂,所以气动传动的灵敏性很差。液压传动除需要专门的维护外,还由于漏油会引起环境污染。电传动可以采用各种伺服电机和离合器。传动装置可直接安装在机械手上面,即安装在靠近实现相应的运动自由度的关节地方,或者安装在固定机械手的基座上。分散配置传动系统的优点是,由电动机到关节之间力的传递简单,因而机械手的结构紧凑。集中配置传动装置可以简化机械手的结构,并且可以比较自由地选择传动的形式和结构,但是,由传动装置向关节传递力需要齿轮、链条及钢索等等。 机器人的行走装置可采取已被广泛应用的任何一种移动装置。在地面上行走时,可利用履带式、转轮式、步行式及其它类型的推进器。 图1所示的感受装置可分为两种主要类型,收集机器人内部状态信息的装置和收集外界环境信息的装置。**类装置用于机器人内部形成反馈。属于**类装置的有;测量机械手各环节的角位移和线位移的传感器,测量机械手各环节的速度和加速度的传感器。第二类装置能够根据外界环境的状态对机器人实现适应性控制。属于第二类装置的有;触觉传感器和定位传感器(它们可以获得接触或接近对象的信息,判断简单的对象的形状)、力传感器(如在装配产品时,用来调节施加给操纵对象的力)和滑动传感器(被操纵的对象从手爪中滑出时滑动传感器有反应并产生信息)。视觉信息是反应外界环境最安全的信息。但是,由于识别图像还有某些困难,所以视觉装置至今未能广泛地应用。在情况发生变化时,必须利用外部环境的信息来控制机器人。 与操作人员联系的装置(见图1)是一套保证操作人员与机器人互相联系的设备。由这些设备可以得到有关机器人操作情况的信息。视觉控制合就属于这种装置。操作人员由控制合能得到关于机器人操作的视觉信息。然后,操作人员在电视接收机的屏幕上用光标标出他所感兴趣的目标的坐标,或者标出机器人应该移动到的目的地。通过控制合能够将机器人各分系统的工作情况传给打字机或者直观显示器。由控制台也可以把来自机器人的询问送给需要此信息的输入端。在没有视觉反馈时,绘图机可向操作人员提供有关机器人在地面行走的信息,由绘图机可以提供预计的运动轨迹。 用声音可给机器人分配任务并可把机器人改装成各种结构形式。现在已经有能分辨200个字词的机器程序和专用装置。用语言综合器,或者,在最简单的情况下,用记录在录音机磁带上的信息,机器人也能够用语音对操作人员作出回答。控制装置(见图1)能将感受装置给出的全部信息加以变换,并产生出对传动装置的控制作用。 有时采用由一台或数台电子计算机组成的分级控制系统去控制机器人(如控制可移动的机器人)。机器人可装上小型机载电子计算机。小型机载电子计算机控制传动装置,并将机器人上的传感器的信息做预处理。信息的交换和控制作用的计算主要由固定式大型电子计算机来完成。大型电子计算机通过电缆或无线电与小型机载电子计算机联系。当联合控制几个机器人时,可采用中心电子计算机和分散的小型电子计算机相结合的控制系统。分散的小型电子计算机附属于中心电子计算机并控制单个机器人。 
文章分类:
技术文章
|

台州捷众智能装备有限公司 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: xhrxyx.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众智能装备阿里巴巴 电 话: 0576-87110816 传 真: 0576-87110816 手 机: 139-6765-7580 邮 箱: 180242@qq.com 网 址: jiezhongcnc.1688.com 地 址: 浙江省台州市玉环市清港徐斗工业区 | 捷众微信公众号 |  扫一扫手机网站 |